
HOKUYO COMPARISON
The table below shows some of the basic features and prices of the Hokuyo units tested and compared in this article. They are, the UTM-30LX-EW, the UST-10LX, and the URG-04LX-UG01.
TABLE OF FEATURES AND PRICES
| UTM-30LX-EW | UST-10LX | URG-04LX-UG01 | |
| LIGHT SOURCE | Semiconductor laser diode (FDA approval, Laser safety class 1) | Semiconductor laser diode (FDA approval, Laser safety class 1) | Semiconductor laser diode (FDA approval, Laser safety class 1) |
| SCANNING RANGE | 0.1 to 30m 270° max range 60m | 0.02 to 10m 270° max range 30m | 0.02 to 5.6m 240° |
| MEASURING ACCURACY | +/-30mm | +/-40mm | +/-30mm |
| ANGULAR RESOLUTION | 0.25° (360/1,400) | 0.352° (360/1,024) | 0.352° (360/1,024) |
| SCANNING FREQUENCY | 40Hz (2,400rpm) | 10Hz (600rpm) | 10Hz (600rpm) |
| MULTI ECHO FUNCTION | Max. 3-echo | N/A | N/A |
| COMMUNICATION PROTOCOL | SCIP 2.2 | SCIP 2.0 | SCIP 2.0 |
| COMMUNICATION | Ethernet 100 BASE-TX | Ethernet 100 BASE-TX | USB 1.1/2.0 |
| DI/O INTERFACE | Scanner synchronous and Failure output | N/A | N/A |
| POWER SOURCE | 12VDC | 12V or 24VDC | USB bus power |
| POWER CONSUMPTION | 0.7A or less | 0.15A or less (on 24VDC) | 0.5A or less |
| AMBIENT ILLUMINANCE | 10,000 lx or less | 10,000 lx or less | 10,000 lx or less |
| PROTECTIVE STRUCTURE | IP67 (1EC standard) | IP65 | N/A |
| WEIGHT | 210g | 130g | 160g |
| SIZE (W X D X H) MM | 62 x 62 x 87.5 | 50 x 50 x 70 | 50 x 50 x 70 |
| PRICE (MSRP) | $5,175.00 | $1,775.00 | $1,148.00 |
CHARACTERISTICS
The three lasers all have similar characteristics except for a few key differences. The major variation in each product is the maximum distance in the scanning range. The UTM-30LX-EW contains a multi-echo function to help cancel noise in the measurement field.
Two of the lasers have Ethernet connections and the other has a USB connection and this difference will be discussed later in the article. The UTM-30LX-EW and UST-10LX come with a removable protective shell, which the URG-04LX-UG01 lacks.
GRAPHICAL COMPARISON OF SIZE
The images below show each product at the same scale to help easily contrast the size of each Hokuyo laser. The dimensions of each unit are listed in the comparison table.

Size comparison of Hokuyo lasers: URG-04LX-UG01, UST-10LX, UBG-04LX-F01, and UTM-30LX-EW (from left to right)

Top view of Hokuyo lasers
The UTM-30LX-EW is slightly larger than the other three, which are all about the same smaller size. The UTM-30LX-EW also has a larger mass at 210g and the UST-10LX, URG-04LX-UG01, and UBG-04LX-F01 have smaller masses at 130g, 160g, and 185g, respectively.
GRAPHICAL COMPARISON OF SCAN RANGE
This diagram shows a graphical representation of the scanning range of each Hokuyo range finding laser featured. It characterizes the measurement range and the view angle of each product.
Each product is shown with a different color where the range of possible measurements is the shown by the length of the arc. The angle swept by each of the shapes represents the maximum viewing angle of the specific laser.
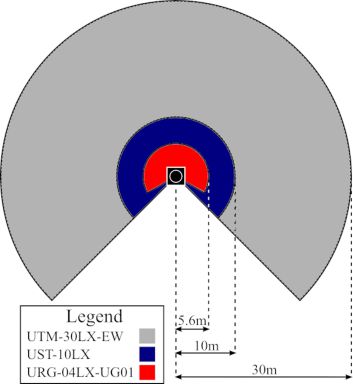
Hokuyo laser scan range
BASIC USAGE - “WRITE YOUR OWN DRIVER”
The following code is written under the assumption that the laser is operating with SCIP2.0 interface.
A cross-platform (Mac OS X, Windows and Linux) working copy of this can be obtained from the Acroname Download Center
/*********************************************/
// Connect
// open a COM port for serial port lasers openComPort(portName, baudrate);
// open an IP port for lasers openIpPort(ipAddress, portNumber);
// E.g.: 192.168.0.10:10940
/*********************************************/
// Initialize
// Gather information from laser
gatherInfo()
// one-time initialization for laser reading buffer
zero(laserScanDistanceArray, sizeof(laserScanDistanceArray));
// Turn on the laser and start the motor spinning
writeLine((const char*)CurrentProtocol[LASER_CMD_ON]);
/*********************************************/
// Scan
// Send the scan command to the laser
string reply;
writeLine("GD%04d%04d%02d\n", measurementMinStep, measurementMaxStep, 1);
// We need to grab the echo from laser; throw it out
readLine(reply);
// If needed, error check the response for correct echo
// Grab the time stamp and toss
readLine(reply);
/*********************************************/
// Parse the output
// Grab a line of data
// All the next lines should be the laser scanning data
int dataIndex = 0;
int value = 0;
int readingIndex = 0;
char *readingData;
int bytesInReading = 3; //SCIP2.0 models reply with 3byte readings; 1.0 use 2 bytes
// read all data coming back until we don’t get anymore
do {
if (!readLine(reply))
break;
// Grab the readings from the reply, remove the checksum byte
readingData = reply.substring(0, reply.length() - 1);
// look for Line feed to get next line in the reading
while (*readingData != '\0') {
// Decode the byte and accumulate
value <<= 6;
value &=~0x3f;
value |= *readingData - 0x30;
++ readingData;
readingIndex = (readingIndex+1)% bytesInReading;
//if this if the final byte of a distance reading, store it into an array of distances
if (readingIndex == 0 && dataIndex < measurementSteps) {
laserScanDistanceArray[dataIndex++] = (float) value / 1000.0f;
value = 0;
} // end decode while
} // end readline if
} while (*reply); // end read data whileDIFFERENCES BETWEEN USB AND ETHERNET
The most obvious difference between the USB and Ethernet communication is appearance. They are clearly different connection types that require different procedures. The USB, found on the URG-04LX-UG01, is the more simple of the two where the laser can send data and be powered through one connection. This allows the user to quickly and easily connect the laser and at once begin taking range data.
The Ethernet 100Base-TX communication uses a standard Ethernet plug and port to transfer the range data to and from the laser. Due to the nature of an Ethernet connection, another wire is necessary to provide electrical power to the laser. This set of wires can also carry additional information such as synchronous output. This additional wire does introduce a further complication, as the laser needs an external DC power source in order to operate.
Once a method to provide electrical power is found, there is still further work that must be done to connect the sensors. It is simpler to write code that interfaces with a device that connects to a COM port like USB. The laser that connects through an Ethernet port must have a way to set or find the IP address of the laser. This problem becomes even more complicated when the laser is not connected through a local network.
USE CASE COMPARISON WITH ACRONAME DEMO APP
The basic goal of each test in both locations (indoor and outdoor) was to examine and compare the range finding ability of the Hokuyo lasers. The placement of the sensors and the testing environment were held constant to increase the effectiveness of the comparison. The tests and results will be further explained in the following sections of this article. Each laser was also tested with a simulated protective acrylic sheet in the path of the laser. This acrylic sheet represents a transparent shield that a user might place around the laser to protect it from any potential harm.
INDOOR PERFORMANCE
The setting of the indoor test was a small section of the Acroname office. This space was a controlled area and was 13’ in the 0° direction and the greatest distance being a length of 14’ 8” in the left front corner. An image of the location of the tests is shown.
 Indoor Testing Environment
Indoor Testing Environment
The advantage of this testing environment was the presence of both translucent surfaces (glass) and opaque surfaces (cardboard, plastic and other office furniture items). Each laser was placed 8” above the surface of the floor and was not obstructed in its field of view by any unintentional objects. A screen shot was captured of the current data being read by the laser. The image of each laser in the same setting will be compared in later sections.Each laser was also compared to itself when a mock protective acrylic sheet was placed in front of the laser. The sheet was placed perpendicular to the 0° direction and 8” away from the laser.
The indoor performance of the UTM-30LX-EW, the UST-10LX, and the URG-04LX-UG01 lasers were performed to compare each in a controlled, low range and low ambient light condition. This evaluation is achieved by comparing the output of each laser placed in the same location within the test environment.The first test performed was a simple range data capture of the environment without any obstructions. The results of each laser can be seen below.
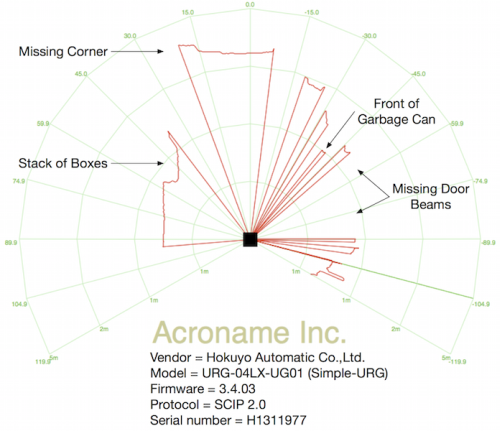
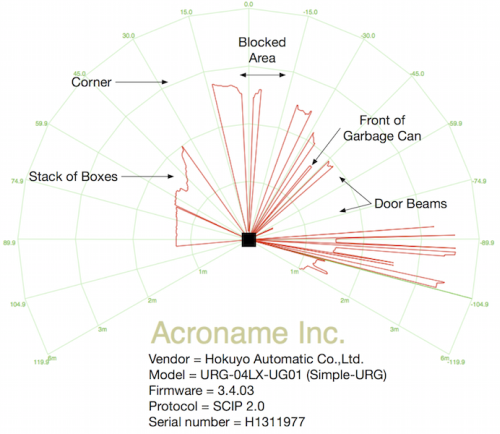
URG-04LX-UG01 indoor results
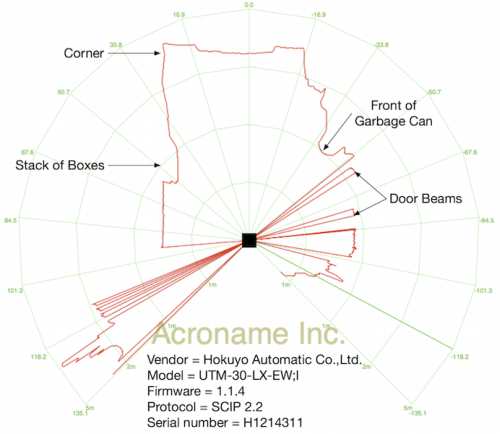
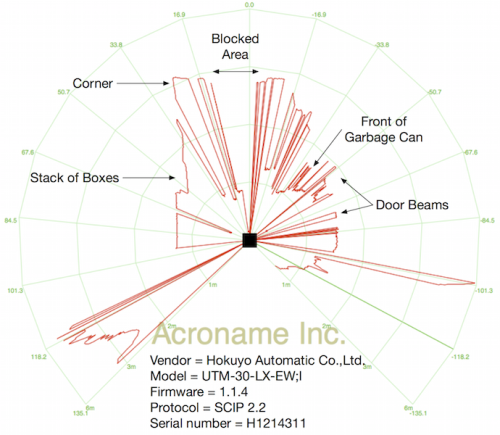
UTM-30LX-EW indoor results
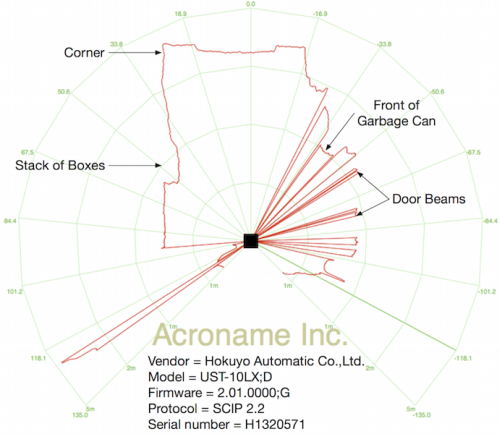
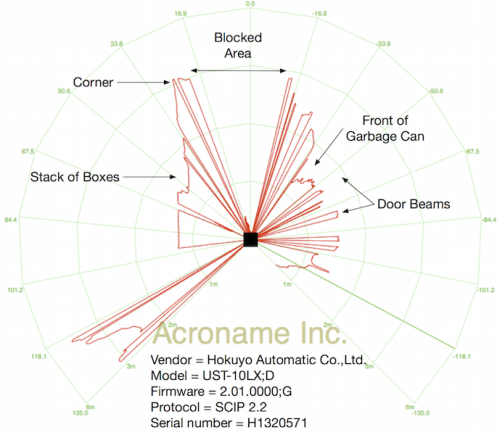
UST-10LX indoor results
The UTM-30LX-EW captures the clearest detail of any of the tested lasers. The stack of flattened boxes can be seen at about 45° and the garbage can is the round shape at about -40°. The beams of the glass door are also visible at about -55° and -75°. The objects are all in the same locations as in the plots of the other two lasers. The UST-10LX produced a similar range plot as the UTM-30LX-EW, with a few more inconsistencies, where the surface was uneven. The URG-04LX-UG01 also created a similar plot to the other two, but with many more inconsistencies. It did miss a few significant portions of the test environment, such as the far left corner (30°) and the door beams. The same procedure outlined above was performed again, but with the addition of a mock acrylic sheet. The setup of the indoor test with the protective acrylic can be seen in the following image. The results from this test are shown below for each of the featured lasers.
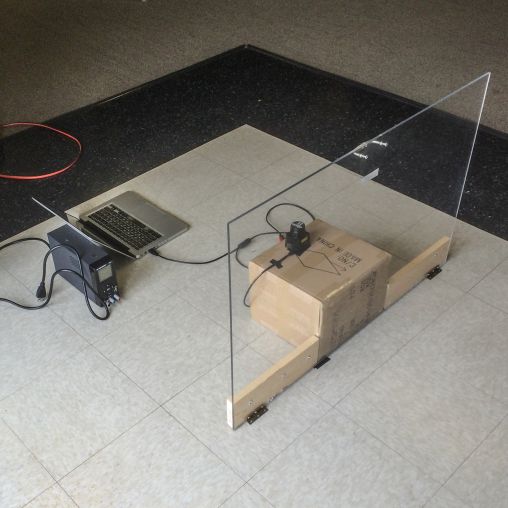
Indoor Acrylic Test Setup
URG-04LX-UG01 indoor results with acrylic
UTM-30LX-EW indoor results with acrylic
UST-10LX indoor results with acrylic
It can be easily seen that the performance of the laser is altered when the protective screen is introduced. The sheet causes more discrepancies in the complete range measurement making the outline of the test environment look choppier. However, with the UTM-30LX-EW and the UST-10LX, the general outline of the more flat surfaces (the left side) can still be viewed. It was also observed in this test that there exists a small window where the range data disappears. This window is centered where the acrylic is perpendicular to the sensor. The behavior mimics what would happen if a small opaque object were placed close to the laser.
SUMMARY OF INDOOR PERFORMANCE
The accuracy of the UTM-30LX-EW and the UST-10LX are almost identical, except for a few spots where the surface was extremely uneven. Both lasers were measuring objects and surfaces well within their range of measurement. The URG-04LX-UG01 finds some of the key objects in the testing space, but has more trouble connecting the whole picture. However, some of the objects are at a distance that is about the maximum for this sensor, which could be the source of this lack of range data. Overall, each laser performed well in the indoor setting with minimal error and accurate range data.
OUTDOOR PERFORMANCE
The outdoor tests were performed in the parking area in front of the Acroname office. This was an ideal location, as it allowed for the examination of many of the attributes of the lasers such as maximum range and sunlight operation. Across the field of view of the lasers the ambient illuminance was measured to be anywhere from 15,000 lx to 40,000 lx.
 Outdoor Testing Environment
Outdoor Testing Environment
As seen in the image, the parking lot is a fairly narrow strip of pavement with two rows of parking spots on both sides. It contains many different sized cars and a wide range of surface materials. Also, it can be seen that there is a vehicle far in the distance at the center of the image. This vehicle was used to demonstrate the laser’s ability to see an object at a long range. Once again, a screen shot of the captured data was taken to record the laser’s ability in each setting. The mock protective sheet was tested again in the outdoor conditions.
OUTDOOR TESTING
The outdoor testing followed a similar procedure as the indoor testing, just in a different location. The outdoor setting made it possible to understand each sensor’s ability to function with high ambient light, long-range measurements, and additional materials. The results of this testing are shown below. It can be seen that there is no data from the URG-04LX-UG01. The URG-04LX-UG01 is rated as an indoor sensor and did not function in the outdoor setting. It should be pointed out that the scale of the two plots are different, the UTM-30LX-EW plot has a max range that is twice the size of the UST-10LX.
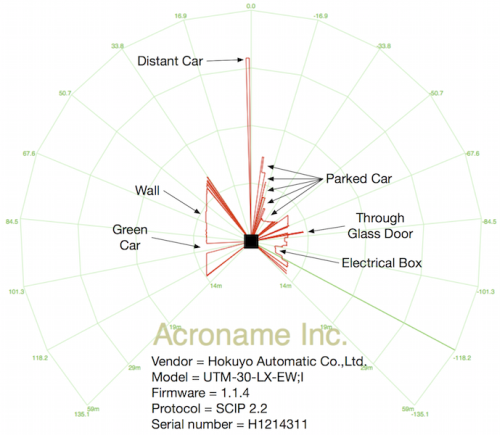
UTM-30LX-EW outdoor results
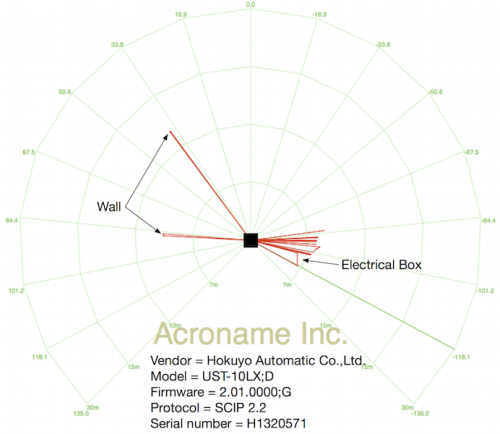
UST-10LX outdoor results
The data from the UTM-30LX-EW has a few interesting sections to point out. Along the left side, a long flat wall can be seen with a break (in the 90° direction) due to the green car seen in the photograph. The vehicle in the 0° direction can be seen as the long spire in the center of the image. The saw tooth pattern, seen on the top right, is five cars in their parking spots. The side of the car closest to the sensor can be seen as the flat portion from about -30° to -50°. The small spike on the right side is due to a reading through the glass door of the Acroname office. The range data from the UST-10LX laser does not create as good of a picture as the UTM-30LX-EW, however it does find a few key objects. It finds two small sections of the wall on the right side of the sensor in the 85° direction and the 35° direction. It also sees the wall directly on the left side and the large electrical box at about -115°. The UTM-30LX-EW and the UST-10LX were also tested outdoors with an acrylic sheet. The sheet was placed 4” from the front of the laser. A dynamic test of the shield was also performed with the UTM-30LX-EW, which will be explained later. The URG-04LX-UG01 was not used in this test as it was found it does not operate outdoors. The results from this test are shown below.
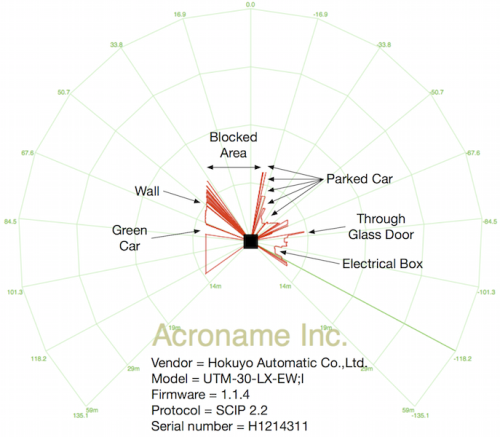
UTM-30LX-EW outdoor results with acrylic
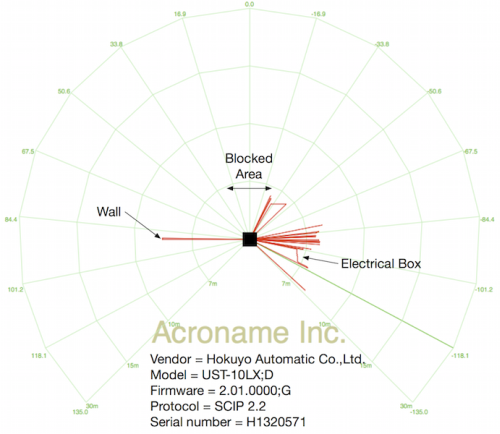
UST-10LX outdoor results with acrylic
The acrylic sheet acts in a similar way as it did during the indoor tests. The sheet will allow for measurements, but only where the laser and the acrylic are not perpendicular to each other. This occurrence can be seen in the two images above, where there is once again the window without measurements centered in the 0° direction.
The dynamic test was similar to the other experiments with the acrylic sheets, except it was moved across the entire field of view of the laser. This video shows the procedure of the test with the data of that test side by side. It clearly shows that as the protective sheet is moved around, the laser the data is dropped when the acrylic is perpendicular to the laser. It is important to point out that the laser can capture data through the acrylic but it must be at an angle.
SUMMARY OF OUTDOOR PERFORMANCE
The results of the outdoor testing produced much more widely varying results than the indoor testing. The largest difference was the inability of the URG-04LX-UG01 to even work outdoors. The UTM-30LX-EW was the only laser that could distinguish objects well at the longer distance and higher ambient light found in the outdoor environment. The UST-10LX was able to characterize a few points on the larger surfaces in the outdoor setting, but not to the extent of the UTM-30LX-EW. The outdoor environment really highlighted the different abilities of each laser.
SUMMARY COMPARISON OF PERFORMANCE
The featured Hokuyo lasers all worked well when operating within their given specifications. During the indoor testing each laser performed exceptionally and only the URG-04LX-UG01 did not work outdoors. All three lasers were able to distinguish relatively flat surfaces while indoors and large objects outdoors. When choosing a laser it is recommended that the desired measurements are well within the manufacturer guaranteed range of measurements, even though there is margin with the maximum measurement range.
The Hokuyo lasers are excellent range finding sensors that are relatively light and small for their ability. The highly accurate lasers could be used alone to create a two-dimensional line as seen in this article. A more useful application would be to use multiple lasers or a laser on a moving platform to create a point cloud to analyze a 3D space. It is incredibly useful for a robot to have the ability to see and comprehend its surrounding, especially if it is a autonomous system.
Add New Comment