
Symonym is a tool for visualizing, simulating and testing robots and dynamic systems in a physics based environment. Acroname created Symonym as both a viewer and a development application for demonstrating and testing electromechanical and software interactions. The Symonym Player plays modeled scenes using OpenGL graphics with the ability to zoom, pan and tilt during runtime. A simulation authoring tool generates optimized models from a XML scripting language for unparalleled portability and dissemination.
What makes Symonym unique is the ability to send targeted code to dedicated communication sockets. This allows the same code that would run on the physical system to target the simulation objects. This process leverages Acroname technologies that include the BrainStem OS and APIs.
Symonym is built from the desire to rapidly manifest challenging systems in a closed environment that has the ruggedness of physically tested systems. Prototyping is fraught with the tedious process that involves building, testing, deployment, adjustment and redesign. One difficult challenge is that algorithms are created by a designer who has the added challenge of abstracting their programming decisions to think in terms of how the robot perceives its environment. Symonym provides the framework to design physical systems and algorithms from the robot's perspective, which can accelerate the design process.
Symonym's development is the product of building complex physical systems that rely on the union of hardware and software. Symonym borrows extensible techniques used in data and visualization software applications such as a plug-in architecture and models described by XML. It is a robust cross platform (Windows, Linux and Mac OS X) simulation viewer and authoring tool built from the ground up to model robotic control systems.
Acroname develops interactive simulation models for contract customers to help demonstrate products, concepts or robot training environments. Models for Acroname's current products are available for download from within the Symonym viewer. Other third-party models available include:
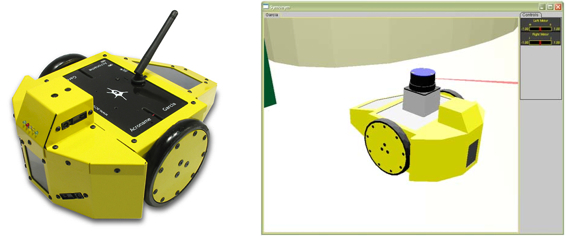
- Acroname's Garcia mobile robot
- Acroname's TinkerTrike mobile robot prototype
- Hokuyo's scanning laser range finder

Point Cloud of Disaster City
The simulator is built on the experience of building physical hardware systems, so it provides an experience that is modeled after actual working systems. In particular, BrainStem controllers are built as plug-ins that can be incorporated into any simulation. The experience of using a BrainStem controller is identical when moving back and forth from the simulation environment to a physical system. The Symonym physics engine is based upon the Open Dynamics Engine (ODE). The combination of true physical properties and dynamics builds the basis for a powerful simulation tool. The Symonym environment offers:
- Rigid Body Dynamics Engine
- Simulated physical BrainStem controller hardware
- Simulated advanced sensors
- Multiple camera perspective views
- Target code execution
- Point cloud data visualization