
The most popular infrared detectors and rangers are designed and manufactured by Sharp.
Boasting a small package, low-power consumption, and a variety of output options, Sharp Infrared Detectors and Rangers are built for any application that requires accurate distance measurements. Creators and innovators use Sharp IR devices for applications in robotics, climatology, meteorology, safety, and environmental detection and exploration.
IR Ranger Finders use triangulation and small linear CCD arrays
Compared to sonar technologies, Infrared (IR) Sensors provide outstanding results at a much more economical price point.
IR rangers use triangulation and a small linear CCD array to compute the distance and/or presence of objects in the field of view. A pulse of IR light is emitted by the emitter. The light travels out into the field of view and either hits an object or just keeps on going. In the case of no object, the light is never reflected, and the reading shows no object. If the light reflects off an object, it returns to the detector and creates a triangle between the point of reflection, the emitter and the detector.
The incident angle of the reflected light varies based on the distance to the object. The receiver portion of the IR rangers is a precision lens that transmits reflected light onto various portions of the enclosed linear CCD array based on the incident angle of the reflected light. The CCD array can then determine the incident angle, and thus calculate the distance to the object. This method of ranging is very immune to interference from ambient light and offers indifference to the color of the object being detected.
Interfacing to microcontrollers is intuitive and straightforward. The single analog output can be connected to an analog-to-digital converter for taking distance measurements, or the output can be connected to a comparator for threshold detection. The detection range of this version is approximately 10 cm to 80 cm (4″ to 32″).
The nonlinear output of Sharp IR rangers and sensors
Due to the trigonometry involved in computing the distance to an object based on the reflected light incident angle, the output of these detectors is non-linear with respect to the distance being measured. The graph below shows an example of the analog output voltage vs distance to an object.
Consistent calibration and data
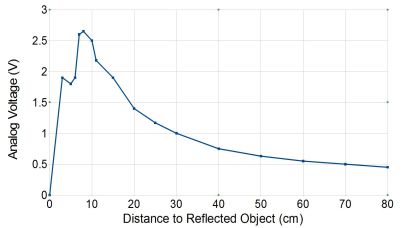
Example graph of Sharp IR Output Voltage vs Distance
As this graph shows, the output of the detectors within the stated range (10cm - 80cm) is not linear but rather somewhat logarithmic. This curve will vary slightly from detector to detector so it is a good idea to "normalize" the output with a lookup table or parameterized function. This way, each detector can be calibrated to be consistent and result in data that varies nearly linearly relative to the distance to the object.
The output drops rapidly once the object is closer than the minimum distance (less than 10cm). A longer ranger or sensor would find this confusing, giving you inaccurate results. This is disastrous for your application if it’s slowing down as it approaches a solid object, gets below the minimum range, and then misinterprets the long-range reading.
If this errant reading is not handled correctly, the robot may drive full-speed into the object. The easiest way to avoid this is to cross-fire the detectors across the width or length of the application as shown below.
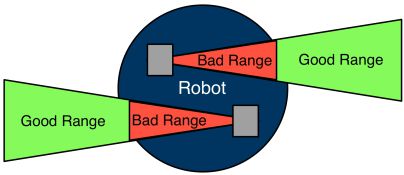
Example of cross-firing detectors to avoid range errors
Beam Pattern
The beam pattern for these IR range finders is rather consistent between types. The beam is roughly football shaped with the widest portion in the middle being about 16cm wide. This is a reasonably narrow beam pattern which makes for great ranging data when coupled with a servo to "sweep" the detector while taking readings.
When using Sharp sensors as a virtual bumper, it is advantageous to have the widest beam pattern possible in order to provide coverage for a large area such as the entire front of the robot. This can easily be accomplished using two sensors whose beams cross over one another in front of the robot (see below). The most common detector to use in this arrangement is the GP2D15.
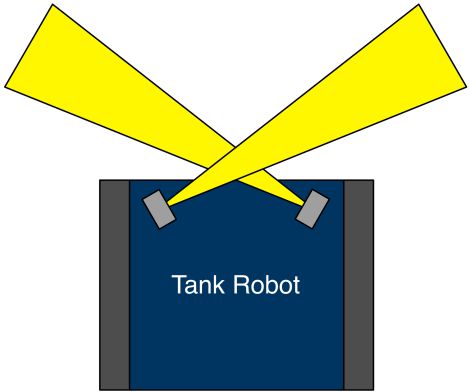
Configuration of two sensors for effectively wider beam width
COMPARING SHARP IR RANGE FINDERS AND SENSORS
The table below characterizes each sensor by minimum and maximum ranges, as well as whether the sensor returns a varying distance value or a digital detection signal:
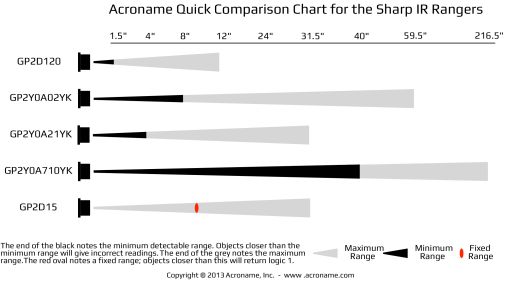
Comparison Chart for Sharp IR Rangers
SHARP IR RANGE COMPARISON
| MODEL | OUTPUT | MIN. RANGE | MAX RANGE |
| GP2D120/GP2Y0A41 | Analog | 1.5" | 11.8" |
| GP2Y0A02 | Analog | 8" | 59" |
| GP2Y0A21 | Analog | 4" | 30" |
| GP2Y0A710 | Analog | 36" | 216" |
| GP2D15 | Digital | 9.5" | |
Sharp Infrared Range Finder Comparison
The GP2Y0A710 ('0A710'), GP2D120, GP2Y0A41, GP2Y0A21 ('0A21'), and GP2Y0A02 ('0A02') sensors offer true ranging information in the form of an analog output. The GP2D15, by contrast, provides a single digital value based on whether an object is present in it's range or not. None of the detectors require an external clock or signal. Instead, they fire continuously, requiring around 25mA of continuous current.
Sharp Infrared Range Finder Mechanical Dimensions
All of the Sharp IR rangers are approximately the same size except the 0A710. This sensor is larger in order to accommodate larger lenses and circuitry required for its superior range of 5.5 meters. The table below summaries the overall mechanical dimensions of each sensor. Be sure to review the datasheets for detailed dimensional drawings.
SHARP IR DIMENSIONS
| MODEL | WIDTH (MM) | HEIGHT (MM) | DEPTH (MM) |
| GP2D120/GP2Y0A41 | 40.75 | 18.9 | 15.5 |
| GP2Y0A02 | 40.75 | 18.9 | 21.6 |
| GP2Y0A21 | 40.75 | 18.9 | 15.5 |
| GP2Y0A710 | 58.00 | 17.6 | 22.5 |
| GP2D15 | 40.75 | 18.9 | 15.5 |
Sharp Infrared Range Finders and Sensors: An economical choice for students and
Sharp IR range finders and sensors are inexpensive, low power, fit in small spaces, and have a unique range. They are best suited for small robotics in small spaces like hallways, rooms, and mazes. While they don’t promise absolute accuracy, they offer solid information for an application that typically deals with noisy information in the first place.
Check out all of the Sharp IR sensors here or take it to the next level with Hokuyo Laser Range Finders.

Size comparison of GP2Y0A710 (left), GP2Y0A02 (right) and GP2D15/120 (bottom)
Add New Comment